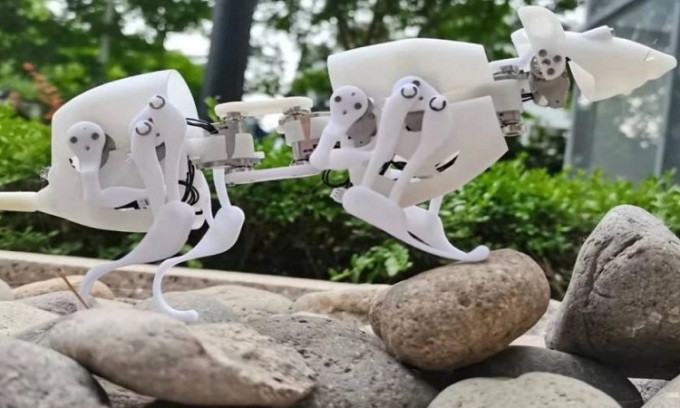
Tuy các nhà khoa học đã tạo ra những robot khám phá không gian hẹp dựa trên rắn và gián, chuột cũng là loài vật thích nghi cao với việc luồn lách qua khe hẹp và di chuyển trên địa hình kém bằng phẳng. Giờ đây, nhóm nghiên đứng đầu là giáo sư Qing Shi ở Viện Công nghệ Bắc Kinh, Trung Quốc, đang phát triển một mẫu chuột robot có tên Chuột robot 4 chân cỡ nhỏ (SQuRo).
Dựa trên kích thước cơ thể và hình dạng của chuột Na Uy (rattus norvegicus), robot mới có hai nấc điều chỉnh ở mỗi chân, eo và đầu. Cách bố trí này mô phỏng cột sống linh hoạt của chuột thật, cho phép robot uốn gập cơ thể nhanh chóng và xoay vòng. Nó có bán kính quay vòng tối thiểu chỉ bằng 0,48 chiều dài cơ thể, nhỏ hơn nhiều so với các robot 4 chân khác cùng kích thước. SQuRo cũng thuôn và nhẹ hơn những robot cùng loại với trọng lượng 220 g. Nó có thể mang vật nặng lên tới 200 g như camera và cảm biến.
Chuột robot có thể tự đứng dậy sau khi ngã, chui qua lối đi khúc khuỷu hẹp cỡ 90 mm, di chuyển qua chướng ngại vật cao 300 mm và duy trì vận động ổn định trong lúc leo dốc 15 độ. Chuyển động của nó được kiểm soát bởi bộ vi xử lý tích hợp, tự động chuyển đổi giữa 3 chế độ chuyển động cơ bản dựa trên phản lực từ mặt đất. Đó là lực tạo bởi mặt đất lên cơ thể tiếp xúc.
Nhóm nghiên cứu hy vọng sau khi phát triển công nghệ sâu hơn, SQuRo có thể ứng dụng trong nhiệm vụ tìm kiếm người sống sót ở vùng thiên tai hoặc kiểm tra những khu vực khó tiếp cận. Họ công bố kết quả nghiên cứu trên tạp chí IEEE Transactions on Robotics.













Ý kiến ()